Approach Summary
Unstructured Terrain with a Gap
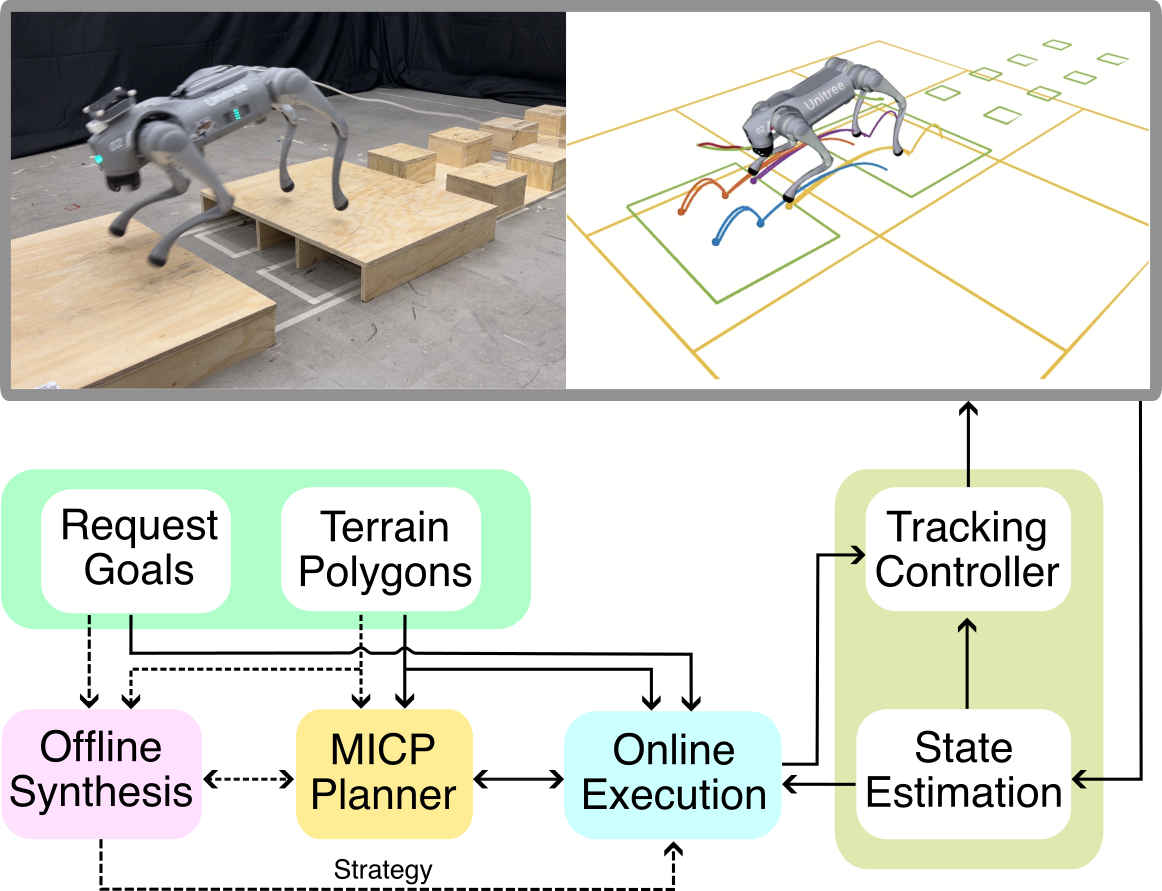
Fig.1 System Diagram
We manage complexity at both symbolic and physical levels. At the symbolic level, we leverage reactive synthesis to decompose the local navigation problem into manageable subproblems whose solutions can be reused by synthesis for different scenarios. Each subproblem corresponds to finding controls for a short-horizon symbolic transition and is solved via a MICP to provide physical feasibility certificates of the transition. As shown in Fig.1, our framework consists of offline synthesis, online execution, and low-level tracking control. During the offline phase, we generate a set of potentially useful skills and corresponding locomotion gaits based on predefined terrain states and goals, while leveraging symbolic repair to find missing yet necessary symbolic transitions. At runtime, we leverage runtime repair to identify new symbolic transitions necessary for unforeseen terrain configurations or intermediate request goals.